
ABB RoboticsとPSYONIC、人間由来のデータでロボットの巧緻性を向上
ABB Roboticsとカリフォルニアの生体工学企業PSYONICは、ロボットの把持能力と巧緻性(器用さ)の向上に向けた協業を発表しました。この取り組みでは、人間の義手使用から得られる実世界の操作データを活用するという、革新的なアプローチが採用されています。
協業の背景と目的
産業用ロボットにおいて、人間の器用さや物体を扱う本能的な能力を再現することは、これまで大きな課題でした。しかし、真に自律的で汎用性の高いロボットを実現するためには、この巧緻性の向上が不可欠です。ABB Roboticsは、PSYONICの先進的な技術と組み合わせることで、この長年の課題を克服し、幅広い産業に新たな可能性を切り拓くことを目指しています。

人間由来のデータを活用した巧緻性向上
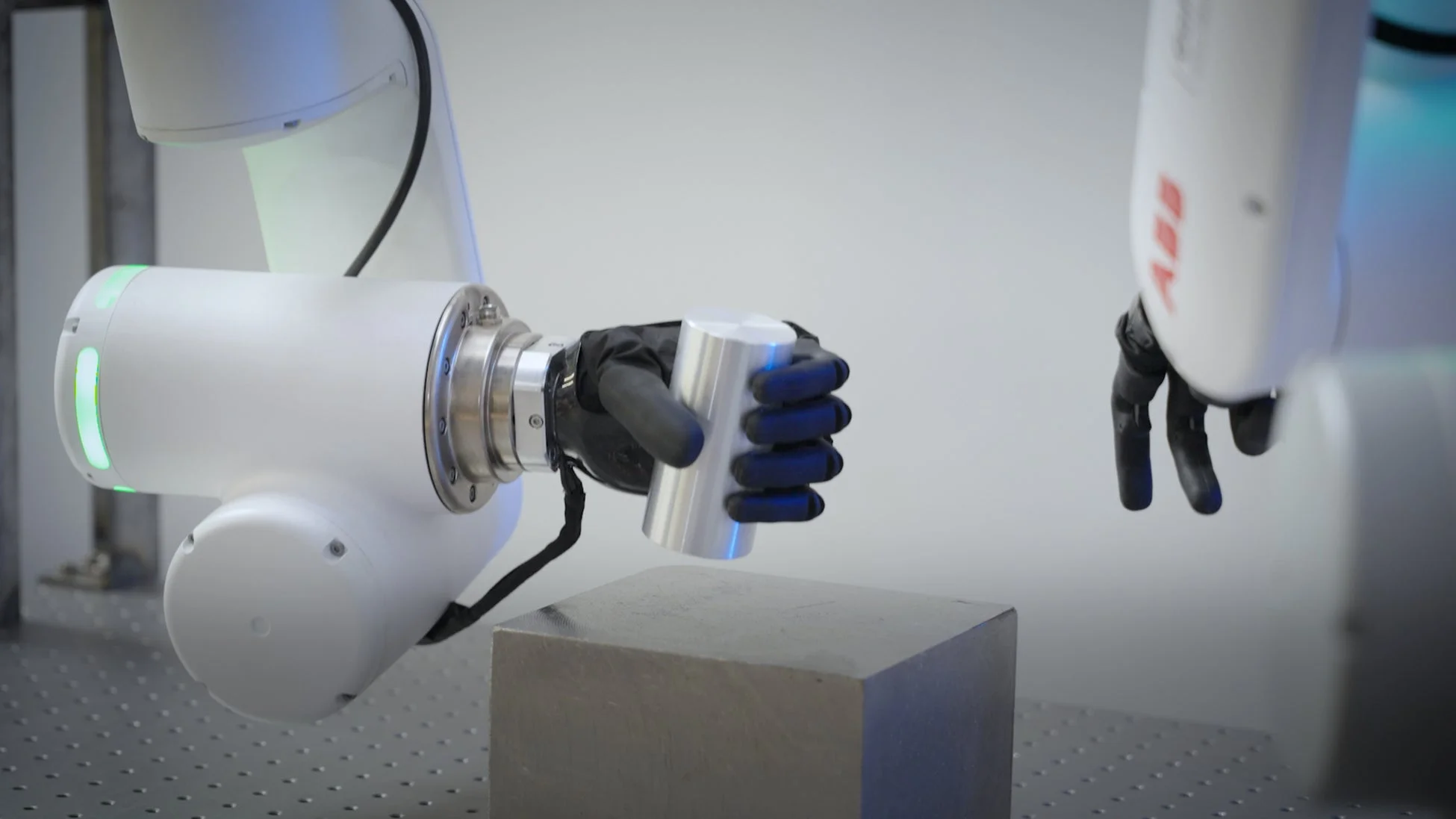
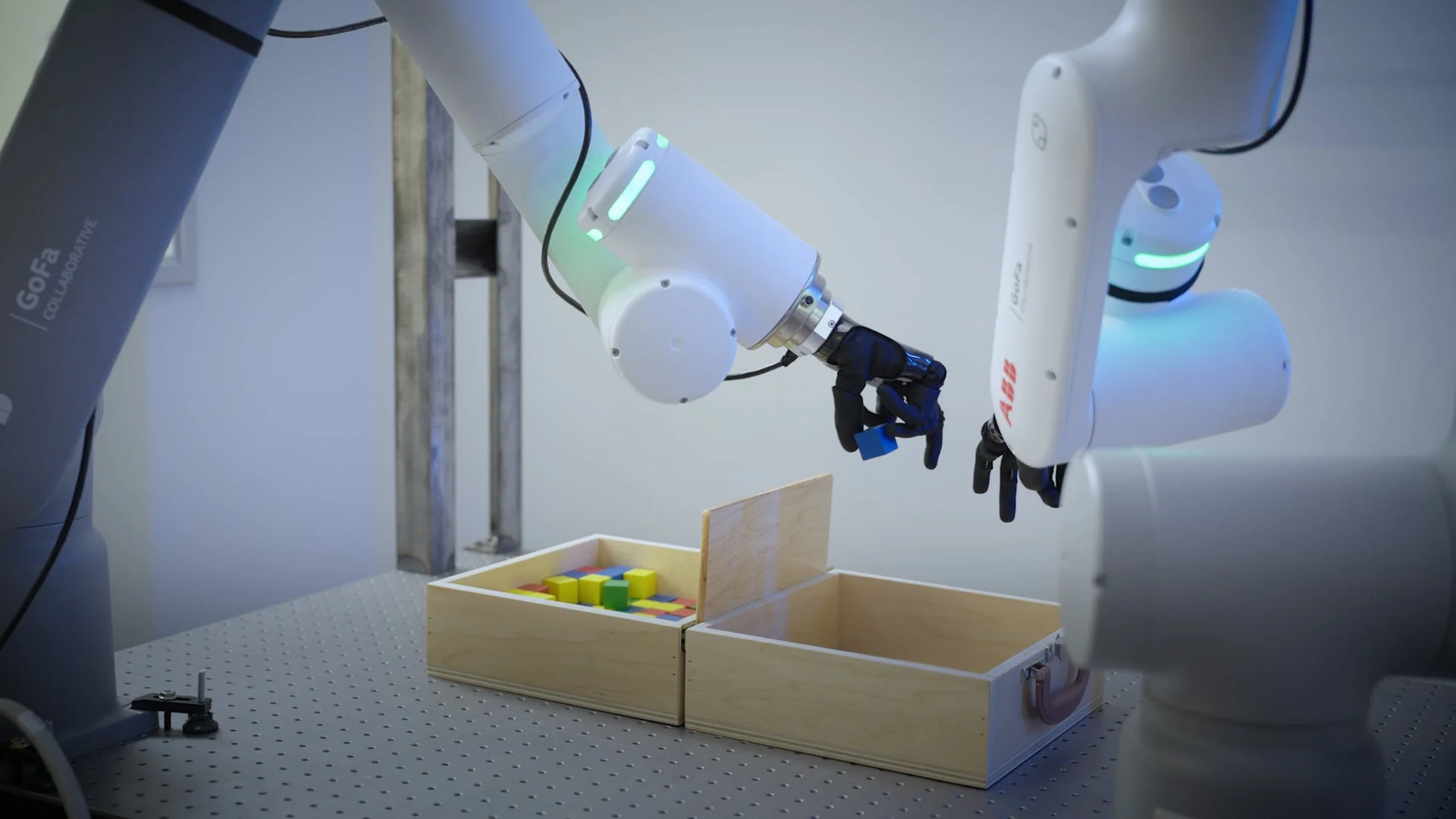
この協業の中心となるのは、PSYONICが開発した「Ability Hand」と、ABBの協働ロボット「GoFa™」の組み合わせです。Ability Handは、もともと義手として開発されたもので、筋電制御、触覚センサー、コンプライアントメカニズムを統合しています。これにより、ユーザーは接触、把持力、解放を感知でき、柔軟な指が不規則な形状や変形しやすい物体にも自然に適応します。
人間がAbility Handを義手として使用する際に生成される触覚および動作データは、ロボットに繊細で多様なタスクを習得させるためのトレーニングデータとして活用されます。ABB RoboticsのGoFa™は、産業用途で求められる精度と再現性を提供し、把持力、指の位置、動作における微細な変動を一貫して実行・評価することで、人間由来の操作データをロボットの信頼性の高い挙動へと変換する役割を担います。
PSYONICの創業者兼CEOであるアディール・アクタル氏は、「繊細な操作は、ハードウェアの課題であると同時に、究極的にはデータの課題でもあります」と述べており、人間とロボットの両方に同じAbility Handを使用することで、高精度な実世界データを収集し、ロボットシステムをより効果的に訓練できると説明しています。
自律型汎用ロボット(AVR™)とフィジカルAIの推進
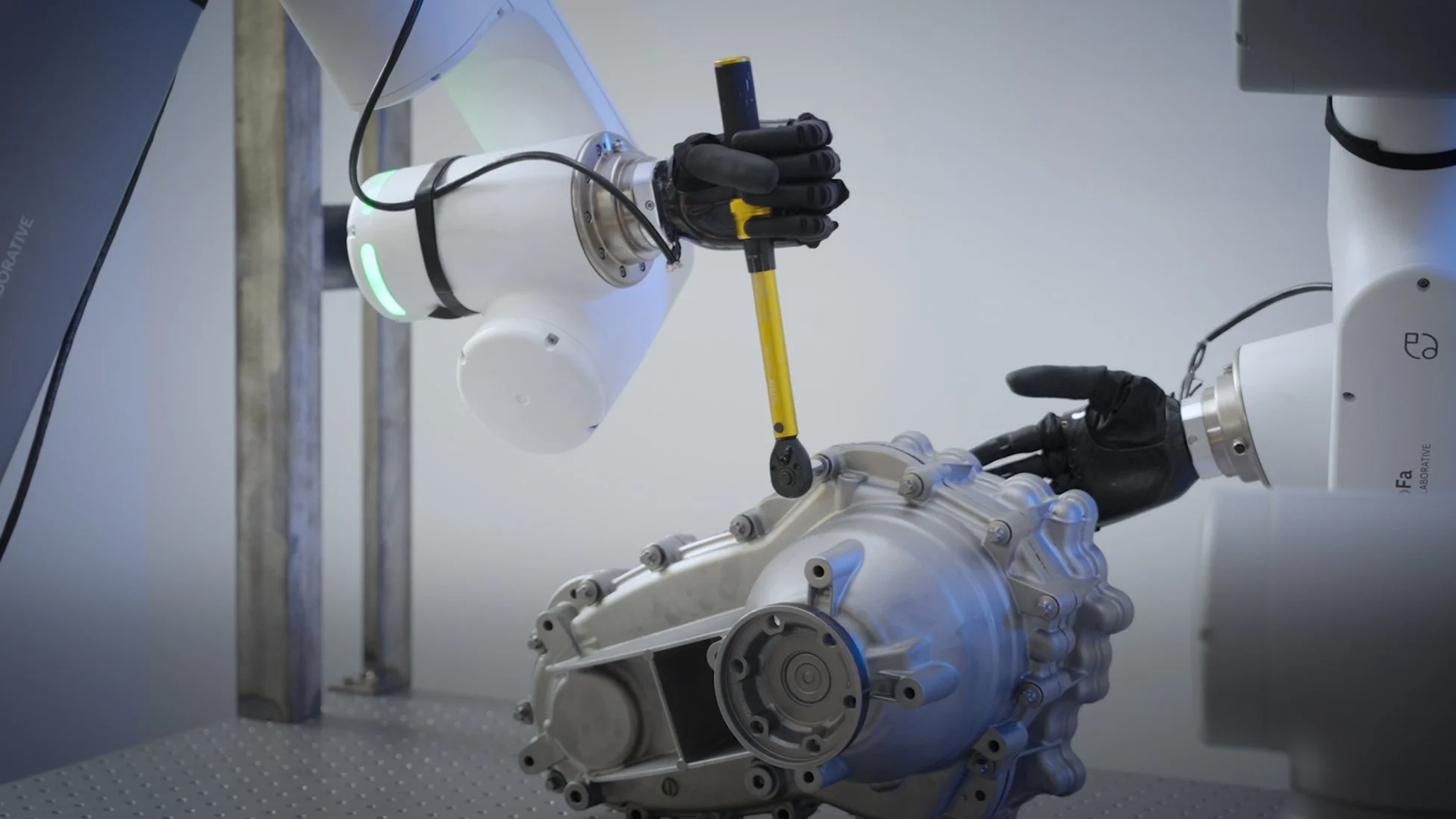
把持力と巧緻性は、ABB Roboticsが掲げる「自律型汎用ロボット(AVR™)」の中核をなす機能です。AVR™は、動的な環境下で物体を感知し、推論し、移動し、精密に扱うことができるロボットを指します。また、現実世界での相互作用から学習し、その知性を産業レベルの信頼性で適用できるロボットシステムとして、産業分野におけるフィジカルAIの発展にとっても極めて重要です。
この協業により、自動車、航空宇宙、包装・物流、ライフサイエンスなど、数多くの産業分野における新たな応用の可能性が探求されます。ロボットが、反復的な作業や身体的な負荷が高い作業、あるいは大規模かつ一貫して実行することが難しい作業を担うことを可能にすることで、生産性、柔軟性、職場の安全性の向上に貢献すると期待されています。
国際ロボット連盟(IFR)によると、高度な把持技術とデジタル統合により、設計期間が最大30%短縮できる可能性が示されており、エンドエフェクタのようなツールが自動化のROI向上に非常に重要であることがわかります。
今後の展望
今回の協業は、自動化における長年の障壁を克服するために、エコシステム全体のパートナーと連携するというABB Roboticsの戦略的なアプローチを反映したものです。ロボティクス、AI、そして人間の義手使用を通じて生成された実世界の操作データを組み合わせることで、ABB RoboticsはフィジカルAIの前進を図り、実環境において信頼性高く動作する、より高性能で適応性の高いロボットの実現を目指しています。
関連リンク:

コメント